Konfiguracje CNC
CYCLE 800 - rotacja osi układu sterowania Sinumerik
CYCLE 800
Najbardziej istotne parametry mające wpływ na działanie cyklu:
| Pozycja | Parametr | Znaczenie | Parametry dodatkowe |
|---|---|---|---|
| 1 | _FR | Tryb wycofania | 0 - bez wycofania, 1 - odjazd w osi Z, 2 - odjazd najpierw w Z, potem w XY, 3 - zarezerwowane, 4 - wycofaj max. w osi narzędzia, 5 - przyrostowy odjazd w osi narzędzia |
| 3 | _ST | Płaszczyzna skrętu | 0 - nowa, 1 - addytywna |
| 4 | _MODE | Tryb skrętu | 27 - ZYX |
| 30 - YZX | |||
| 39 - ZXY | |||
| 45 - XZY | |||
| 54 - YXZ | |||
| 57 - XYZ | |||
| 14 | _DIR | Kierunek obrotu | -1 - kierunek ujemny, +1 - kierunek dodatni, 0 - brak ruchu (tylko obliczenia) |
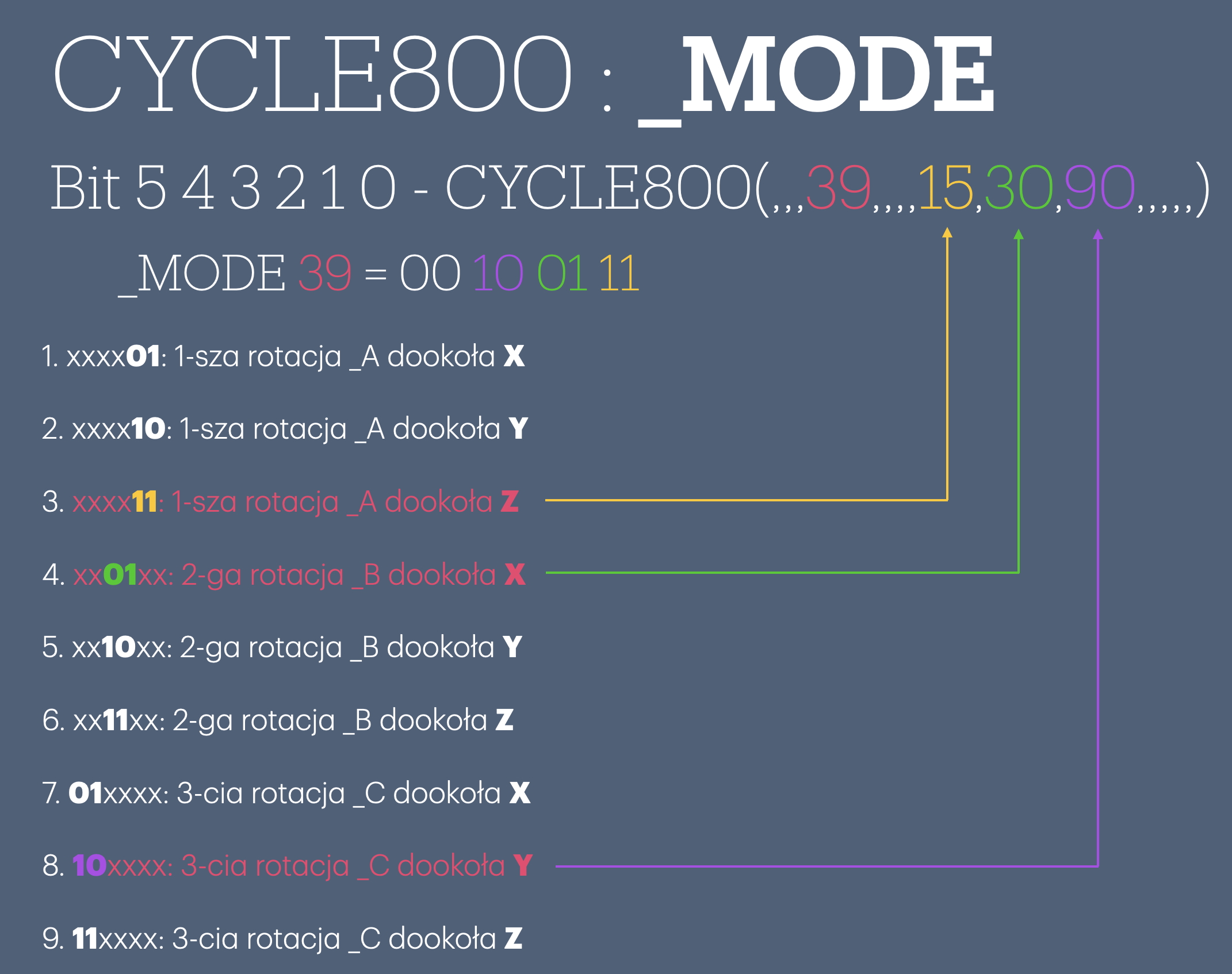
Parametr: _MODE
Wprowadź linię cyklu aby odczytać jego parametry:
Wszystkie parametry cyklu:
| Pozycja | Parametr | Znaczenie | Parametry dodatkowe |
|---|---|---|---|
| 1 | _FR | Tryb wycofania (Retraction mode) | |
| 0 = bez wycofania (no retraction) | |||
| 1 = Wycofaj w osi Z (Retraction machine axis Z) | |||
| 2 = Wycofaj najpierw w osi Z, a następnie w XY (Retraction machine axis Z and then XY) | |||
| 3 = zarezerwowane (reserved) | |||
| 4 = Maksymalne wycofanie w osi narzędzia (Maximum retraction in tool direction) | |||
| 5 = Przyrostowe wycofanie w osi narzędzia (Incremental retraction in tool direction) | |||
| 2 | _TC | Nazwa zestawu danych rotacji (Name of swivel data record) | |
| "" = brak nazwy - tylko jeśli istnieje jeden zestaw (no name - if only 1 swivel data record exists) | |||
| "NAZWA" = nazwa zestawu danych skrętu (name of swivel data record) | |||
| "0" = cofnięcie wyboru zestawu danych (Deselected swivel data record - delete the swivel frames) | |||
| 3 | _ST | Płaszczyzna skrętu (Status transformation) | |
| MIEJSCE JEDNOSTEK: | |||
| 0 = Nowa (New, swivel level is deleted and recalculated using the current parameters) | |||
| 1 = Addytywna (Additive, swivel level is added to active swivel level) | |||
| MIEJSCE DZIESIĄTEK: Wymiana końcówki narzędzia tak/nie (aktywne tylko przy ustawionej funkcji IBN SWIVEL) | |||
| 0 = Nie aktualizować wierzchołka narzędzia (Do not replace tool tip) | |||
| 1 = Aktualizuj wierzchołek narzędzia (Replace tool tip - TRAORI) | |||
| MIEJSCE SETEK: Dojście/wyrównanie narzędzia | |||
| 0 = Nie dojeżdzaj narzędziem (Do not approach tool) | |||
| 1 = Podjazd narzędziem (Approach tool) | |||
| 2 = Wyrównanie narzędzia tokarskiego (gdy oś kinematyczna B jest ustawiona do frezowania w trybie obrotowym IBN) (Align turning tool - when B axis kinematic is set up for milling in IBN swiveling) | |||
| 3 = Wyrównanie narzędzia frezującego (gdy oś kinematyczna B jest ustawiona do frezowania w trybie obrotowym IBN) (Align milling tool - when B axis kinematic is set up for milling in IBN swiveling) | |||
| 9 = zarezerwowane (reserved) | |||
| MIEJSCE TYSIĘCY: Parametr wewnętrzny „Obrót w trybie JOG” | |||
| MIEJSCE DZIESIĄTEK TYSIĘCY: Zobacz parametr kierunku _DIR | |||
| 0 = Obróć „tak” (Swivel "yes") | |||
| 1 = Obróć w kierunku „nie”, „minus” (Swivel "no", "minus" direction) | |||
| 2 = Obróć w kierunku „nie”, „plus” (Swivel "no", "plus" direction) | |||
| MIEJSCE SETEK TYSIĘCY: Zobacz parametr kierunku _DIR | |||
| 0 = Zgodny (Compatibility) | |||
| 1 = Wybór kierunku „Minus” zoptymalizowany (Direction selection "Minus" optimized) | |||
| 2 = Wybór kierunku „Plus” zoptymalizowany (Direction selection "Plus" optimized) | |||
| 4 | _MODE | Tryb skrętu (Swivel mode) | |
| BIT 7 6: | |||
| 0 0: pojedynczymi osiami (standard) -> patrz parametry _A, _B, _C (Swivel angle axis-by-axis (ZYX) -> see parameters _A, _B, _C) | |||
| 0 1: kąt przestrzenny -> patrz parametry _A, _B (Solid angle -> see parameters _A, _B) | |||
| 1 0: kąt projekcji -> patrz parametry _A, _B, _C (Projection angle -> see parameters _A, _B _C) | |||
| 1 1: bezpośredni obrót osi -> patrz parametry _A, _B (Direct rotary axis swivel mode -> see parameters _A, _B) | |||
| BIT 5 4 3 2 1 0: nie ma zastosowania w kątach przestrzennych | |||
| x x x x 0 1: pierwsza rotacja _A wokół X (1st rotation _A around X) | |||
| x x x x 1 0: pierwsza rotacja _A wokół Y (1st rotation _A around Y) | |||
| x x x x 1 1: pierwsza rotacja _A wokół Z (1st rotation _A around Z) | |||
| x x 0 1 x x: druga rotacja _B wokół X (2nd rotation _B around X) | |||
| x x 1 0 x x: druga rotacja _B wokół Y (2nd rotation _B around Y) | |||
| x x 1 1 x x: druga rotacja _B wokół Z (2nd rotation _B around Z) | |||
| 0 1 x x x x: trzecia rotacja _C wokół X (3rd rotation _C around X) | |||
| 1 0 x x x x: trzecia rotacja _C wokół Y (3rd rotation _C around Y) | |||
| 1 1 x x x x: trzecia rotacja _C wokół Z (3rd rotation _C around Z) | |||
| Wskazówka: Bit 0 do 5 w przypadku kąta przestrzennego jest bez znaczenia | |||
| 5 | _X0 | Punkt odniesienia X przed obrotem (Reference point X prior to rotation) | |
| 6 | _Y0 | Punkt odniesienia Y przed obrotem (Reference point Y prior to rotation) | |
| 7 | _Z0 | Punkt odniesienia Z przed obrotem (Reference point Z prior to rotation) | |
| 8 | _A | Kąt osi (Axis angle) | |
| 1. Kąt osi (tryb skrętu pojedynczymi osiami) (Axis angle - axial swivel mode) | |||
| 2. Kąt obrotu w płaszczyźnie XY wokół osi Z - tryb skrętu kąt przestrzenny (Angle of rotation about the Z axis in XY plane - solid angle swivel mode) | |||
| 3. Kąt osi (skręt przez kąt projekcji) kolejność osi (Axis angle - projection angle swivel mode - sequence of axes) | |||
| 9 | _B | Kąt osi (Axis angle) | |
| 1. Kąt osi (tryb skrętu pojedynczymi osiami) (Axis angle Axis angle - axial swivel mode) | |||
| 2. Kąt obrotu w przestrzeni wokół osi Y (tryb skrętu kąt przestrzenny) (Angle of rotation in space about the Y axis - swivel mode 'solid angle') | |||
| 10 | _C | Kąt osi (Axis angle) | |
| 1. Kąt osi (tryb skrętu pojedynczymi osiami, kąt projekcji) (Axis angle - axial, projection angle swivel modes | |||
| 11 | _X1 | Punkt zerowy X po obrocie (Reference point X after rotation) | |
| 12 | _Y1 | Punkt zerowy Y po obrocie (Reference point Y after rotation) | |
| 13 | _Z1 | Punkt zerowy Z po obrocie (Reference point Z after rotation) | |
| 14 | _DIR | Kierunek obrotu (Direction) | |
| -1 (minus) = mniejsza wartość osi obrotowej (standard) ((minus)...Lower rotary axis value (default)) | |||
| +1 (plus) = większa wartość osi obrotowej ((minus)...Lower rotary axis value (default)) | |||
| 0 = brak ruchu osi obrotowych (tylko obliczanie) (Do not swivel (merely calculate swivel frame)) | |||
| 15 | _FR_I | Przyrostowa wartość wycofania w kierunku osi narzędzia (Value (inc) of retraction in tool direction incremental) | |
| 16 | _DMODE | Tryb wyświetlania (Display mode) | |
| 0 = Zgodność, poziom obowiązujący przed rozpoczęciem cyklu wywołania pozostaje aktywny (Compatibility, the level effective before cycle call remains active) | |||
| 1 = G17 - aktywny tylko w cyklu (G17 - only active in the cycle) | |||
| 2 = G18 - aktywny tylko w cyklu (G18 - only active in the cycle) | |||
| 3 = G19 - aktywny tylko w cyklu (G19 - only active in the cycle) |
* Parametry 15 i 16 nie występują w każdej wersji sterowanie (Powerline, Solutionline)
Powrót na górę